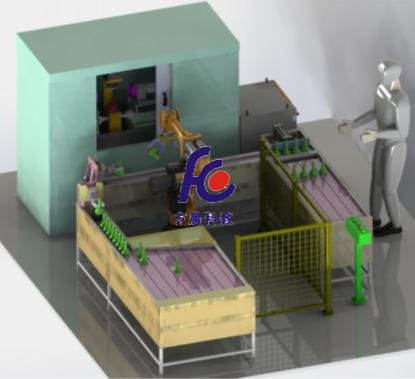
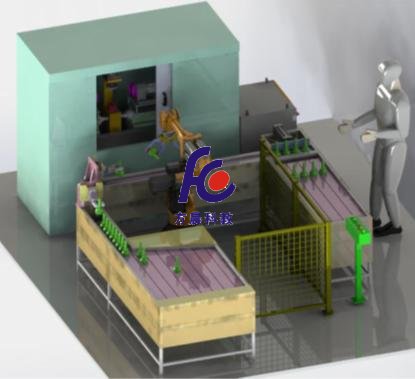
FC-980C型机床上下料机器人工作站
一、概述
机床上下料机器人工作站以工业机器人与数控加工中心为核心,将机械、气动、运动控制、有机地进行整合,结构模块化,使数控机床上下料环节取代人工完成工件的自动装卸功能,主要适应对象为大批量、重复性强或是工件重量较大以及工作环境具有高温、粉尘等恶劣条件情况下使用。具有定位精确、生产质量稳定、减少机床及刀具损耗、工作节拍可调、运行平稳可靠、维修方便等特点。为了方便实训教学,系统进行了专门的设计,可以完成各类机器人单项训练和综合性项目训练,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、工件自动抓取、上料、下料、装卡、工件移位翻转、工件转序加工等等训练。
二、技术性能
1. 输入电源:三相五线~380V±10% 50Hz
2. 工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
3. 装置容量:<20kVA
4. 实训平台尺寸:4000mm×3500mm×1500mm
5. 安全保护:具有漏电保护,安全符合国家标准
三、设备结构与组成
1、工业机器人本体
1)具有6个自由度,串联关节型工业机器人
2)安装方式包括地面安装、挂装、倒装
3)工作半径为1405mm
4)有效负载6kg
5)重复定位精度±0.05mm
6)机器人防护等级IP40
7)机器人本体重量143kg
8)第1轴工作范围为+165°/-165°,旋转速度150°/s
9)第2轴工作范围为+155°/-90°,旋转速度150°/s
10)第3轴工作范围为+70°/-200°,旋转速度160°/s
11)第4轴工作范围为+170°/-170°,旋转速度360°/s
12)第5轴工作范围为+120°/-120°,旋转速度320°/s
13)第6轴工作范围为+360°/-360°,旋转速度360°/s
2、工业机器人控制器
1)整体尺寸224mm×124mm×57mm
2)重量 1.2kg
3)防护等级IP20
4)采用SRL工业机器人语言编程
5)包含StepArcWelding弧焊工艺包
6)包含数字量输入输出模块、模拟量输出模块
7)额定电源电压为24DCV±10%,频率为50HZ
8)工作环境温度0℃-60℃
9)支持EtherCAT、CANopen、DeviceNet、Profibus DP工业总线 "
10)Atom 双核处理器
11)CFast存储
12)提供EtherNet、RS232/485接口
3、工业机器人示教器
1)8英寸电阻触摸屏
2)整体尺寸480mm×245mm×65mm
3)重量 2.4kg
4)支持多按键、触摸屏操作
5)可通过USB接口直接存储与读取应用程序
6)包含8米线缆
7)支持USB HOST、USB OTG、Ethernet接口
8)安全操作:支持急停、三位使能
9)抗干扰能力:符合《GBZ 19397-2003 工业机器人电磁兼容性试验方法和性能评估准则 指南》
10)7英寸电阻触摸屏
11)整体尺寸252mm×240mm×114mm重量1.25kg
12)可通过触摸屏操作
13)可通过USB接口直接存储与读取应用程序
14)可国际通用,所有功能均已固化在软件之中
4、工业机器人底座
材料采用碳钢焊接拼装整体尺寸为1000mm×1000mm×185mm表面喷漆
5、电气控制柜
1)控制柜整体尺寸为650mm×590mm×900mm
2)额定输入电压400VAC ± 10% / 50~60Hz
3)电流16A
4)容量30KVA
5)重量约150kg
6)防护等级IP53
7)电气控制设备保证使用寿命和设备安全
8)系统周边设备控制组件
6、立式加工中心
机床为X、Y、Z三轴伺服直联控制半闭环立式加工中心,三轴均为钢球滚动直线导轨,导轨负载大、跨距宽、精度高, XY Z向为35MM重载,结构及外形尺寸紧凑合理,主轴为伺服电机通过同步带驱动。能够实现对各种盘类、板类、壳体、凸轮、模具等复杂零件一次装夹,可完成钻、铣、镗、扩、铰、刚性攻丝等多种工序加工,适合于多品种、中小批量产品的生产,能满足对复杂、高精度零件的加工。可配第四旋转轴,以满足特殊零件的加工要求。
四、学习和操作内容
1、硬件的安装与调试
a、工业机器人底座的安装与调试技术 b、工业机器人安装与调试技术 c、工业机器人夹具(装配)安装与调试技术 d、工业机器人夹具(平面轨迹)安装与调试技术 e、工机器人夹具(垂直轨迹)安装与调试技术
2、电气安装与调试
a、工业机器人本体与控制器之间的电气连接与调试技术 b、工业机器控制器和控制柜之间电气连接与调试技术 c、工业机器人夹具(装配)电气连接与调试技术
3、编程调试和应用
a、工业机器人编程调试软件的安装
b、工业机器人通过示教器对工业机器人的运作过程调试 c、通过计算机软件对工业机器人的运作过程调试 d、通过I/0板对机器人运作的控制 e、机器人控制数据库的建立和应用 f、工业机器人装配运行的编写 g、可编程控制器程序的编写和设计
4、设备的维护和保养
a、能够按照机器人操作规程对机器人进行安全检查 b、根据系统的异常,机械故障进行简单的维修和保养 c、工业机器人的日、周、月检查与维护
点
击
隐
藏








 QQ咨询
QQ咨询
 在线客服
在线客服
